Multiprocessor Configuration
Multiprocessor is the set of multiple processors that executes instructions simultaneously. There are basically three configurations of multiprocessor:
- Coprocessor Configuration
- Closely Coupled Configuration
- Loosely Coupled Configuration
Coprocessor Configuration
A coprocessor performs the similar task which the microprocessor performs. It is a specially designed circuit on microprocessor chip used to decline the work load of the main processor. It shares the same memory, I/O system, bus, control logic and clock generator. The coprocessor handles special task like mathematical calculations, graphical display on screen etc.
Intel 8086 and 8087 cannot perform complex mathematical operations, so in these cases, the microprocessor requires the math coprocessor like Intel 8087 math coprocessor, which can easily perform complex mathematical operations very quickly.

Fig: Block Diagram of Coprocessor configuration
Connection between processor and coprocessor
- The processor and coprocessor are connected via RQ-/GT-, TEST, QS0 and QS1 signals.
- TEST signal is connected to BUSY pin of coprocessor and the remaining 3 pins are connected to the same pins of the coprocessor.
- RQ-/GT- : This signal is used for the arbitration of bus.
- QS0 and QS1: These are used to track the status of the queue of the host processor.
- TEST: This signal is used to take care of the coprocessor?s activity i.e. the coprocessor is idle or busy.
Closely Coupled Configuration
Closely coupled configuration is exactly similar to the coprocessor configuration. Like coprocessor, it also shares the same memory, I/O system bus, and control logic and control generator with the host processor. However, the host processor and the coprocessor fetch and execute their own instructions. The system bus is handled by the coprocessor and the host processor independently.

Fig: Block diagram of closely coupled configuration
How are the processor and independent processor connected?
- Memory space is used to provide the connection between independent processor and host processor.
- It does not use any instructions like WAIT, ESC etc. for communication.
- The host processor sends the commands to the ports for managing the memory and for waking up the independent processor.
- The independent processor accesses the memory and executes the task.
- When the task has been completed, it sends an acknowledgement to the host processor by using the status signal or an interrupt request.
Loosely Coupled Configuration
A loosely coupled multiprocessor configuration consists of the number of modules of the microprocessor based systems, which are connected through a common system bus. Each module of this configuration consists of their own clock generator, memory, I/O devices and is connected through a local bus.

Fig: Block Diagram of loosely coupled configuration
8087 Numeric Data Processor
8087 numeric data processor is also known as Math Co-Processor, Floating point unit or Numeric processor extension.
It was first designed by Intel to pair with 8086/8088 resulting in easier and faster calculations.
Once the instructions are identified by the 8086/8088 processor, then it is sent to the 8087 co-processor for further execution.
The data types supported by Intel 8087 are:
- Binary integers
- Packed decimal numbers
- Real numbers
- Temporary real format
Features of 8087 numeric data processor
- It supports different data types like integer, float, and real types ranging from 2-10 bytes.
- It follows IEEE floating point standards.
- The processing speed is so high.
8087 Architecture
- 8087 architecture is divided into two group i.e.
- Control Unit (CU)
- Numeric Extension Unit (NEU)
- The Control Unit is responsible for all the communication between the processor and the memory such as it reads and writes memory operands, receives and decodes instructions, maintains parallel queue, etc.
- The Numeric Extension Unit (NEU) is responsible for all the numeric processor instructions like arithmetic, logical, transcendental, and data transfer instructions. It has 8 register stacks, which holds the operands for instructions and their results.
- CU and NEU works asynchronously with each other.
- Intel 8087 uses QS0 and QS1 pins to obtain and identify the instructions fetched by the host CPU.
- All the coprocessor instructions are identified by Escape (ESC) instructions code bits i.e. they start with ‘F’. The coprocessor only executes the Escape instructions while other instructions are executed by the microprocessor.
- Once CPU recognizes ESC code, it triggers the execution of the numeric processor instruction in 8087.
- While executing, the ESC code identifies the coprocessor instruction that require memory operand or not. If the CPU does not require any memory operand, it will directly execute otherwise physical address of the operand is calculated using any one of the addressing modes allowed in 8086 and 1 dummy read cycle is initiated by the CPU.
- Then 8087 is ready with execution outputs, CU gets the control of bus from 8086 and executes a write cycle to write the outputs in the memory at the pre specialized address.
- Microcode control unit generates control signals required for execution of the instruction.
- Programmable shifter is used to shift the operands during the execution of instructions like FMUL and FDIV.

Fig: Architecture of 8087 Coprocessor
8087 Pin Description
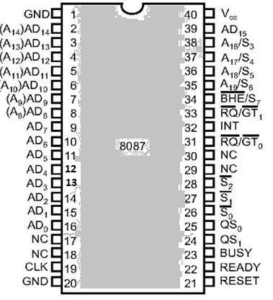
Fig: Pin diagram of Intel 8087
- AD0 – AD15: These are time multiplexed address/data lines, which carry addresses during T1 clock cycle and data during T2, T3, Tw and T4 clock cycles.
- A19/S6 – A16/S3: These are the time multiplexed address/status lines. These functions are similar to the pins of Intel 8086.
- BHE/S7: During the first clock cycle, it is used to enable data on to the higher byte of the 8086 data bus and after that during T2, T3, Tw and T4 clock cycles, it works as status line S7.
- QS1 – QS0: These are queue status input signal which is responsible for status of instruction queue.
Conditions of QS1 – QS0 are given below:
| QS0 | QS1 | Status |
| 0 | 0 | No operation |
| 0 | 1 | 1st byte of opcode from the queue |
| 1 | 0 | Empty the queue |
| 1 | 1 | Subsequent byte from the queue |
- INT: It is an interrupt signal used to indicate an unmasked exception has been received during the execution.
- BUSY (Output): When BUSY signal high then it indicates a busy state to the CPU.
- READY (input): This signal is used to reject the internal activities of the coprocessor and prepare it for further execution whenever required by the CPU.
- S0, S1, S2: These are the status signals which gives the status of the operation which is used by the Bus Controller 8087 to generate memory and I/O control signals.
| S2 | S1 | S0 | Status |
| 0 | X | X | Unused |
| 1 | 0 | 0 | Unused |
| 1 | 0 | 1 | Memory Read |
| 1 | 1 | 0 | Memory Write |
| 1 | 1 | 1 | Passive |
- RQ/GT1 and RQ/GT0: These are Request/Grant signals used by the 8087 processors to get the control of the bus from the host processor 8086/8088 for operand transfers.
- CLK (input): This input gives the basic timings for the processor operation.
- VCC: Power supply +5V.
Memory and I/O Interfacing
Several memory chips and I/O devices are connected to a microprocessor.
The following figure shows a schematic diagram to interface memory chips and I/O devices to a microprocessor.

Memory Interfacing
When we are executing any instruction, the address of memory location or an I/O device is sent out by the microprocessor. The corresponding memory chip or I/O device is selected by a decoding circuit.
Memory requires some signals to read from and write to registers and microprocessor transmits some signals for reading or writing data.
The interfacing process includes matching the memory requirements with the microprocessor signals. Therefore, the interfacing circuit should be designed in such a way that it matches the memory signal requirements with the microprocessor’s signals.
I/O interfacing
As we know, keyboard and displays are used as communication channel with outside world. Therefore, it is necessary that we interface keyboard and displays with the microprocessor. This is called I/O interfacing. For this type of interfacing, we use latches and buffers for interfacing the keyboards and displays with the microprocessor. However, the main drawback of this interfacing is that the microprocessor can perform only one function.
8279 Programmable Keyboard
The Intel 8279 is a programmable keyboard interfacing device. Data input and display are the integral part of microprocessor kits and microprocessor-based systems.
8279 has been designed for the purpose of 8-bit Intel microprocessors.
8279 has two sections namely keyboard section and display section.
The function of the keyboard section is to interface the keyboard which is used as input device for the microprocessor. It can also interface toggle or thumb switches.
The purpose of the display section is to drive alphanumeric displays or indicator lights. It is directly connected to the microprocessor bus.
The microprocessor is relieved from the burden of scanning the keyboard or refreshing the display.
Some important Features are:
- Simultaneous keyboard display operations
- Scanned sensor mode
- Scanned keyboard mode
- 8-character keyboard FIFO
- Strobed input entry mode
- 2-key lock out or N-key roll over with contact debounce
- Single 16-charcter display
- Dual 8 or 16 numerical display
- Interrupt output on key entry
- Programmable scan timing and mode programmable from CPU
8257 DMA Controller
The data transfer from fast I/O devices to the memory or from the memory to I/O devices through the accumulator is a time consuming process. For this situation, the Direct Memory Access (DMA) technique is preferred. In DMA data transfer scheme, data is directly transferred from an I/O device to RAM or from RAM to an I/O device.
Using a DMA controller, the device requests the CPU to hold its address, data and control bus, so the device is free to transfer data directly to/from the memory. The DMA data transfer is initiated only after receiving HLDA signal from the CPU.
DMA operations:
Following are the operations performed by a DMA:
- Initially, the device has to send DMA request (DRQ) to DMA controller for sending the data between the device and the memory.
- The DMA controller sends Hold request (HRQ) to the CPU and waits for the CPU for the HLDA.
- When CPU gets the HLDA signal then, it leaves the control over the bus and acknowledges the HOLD request through HLDA signal.
- Now the CPU is in the HOLD state and the DMA controller has to manage the operations over the buses between the CPU, memory and I/O devices.
Intel 8257
- The Intel 8257 is a programmable DMA controller.
- It is a 4-channel programmable Direct Memory Access (DMA) controller.
- It is a 40 pin I.C. package and requires +5V supply for its operation.
- It can perform three operations, namely read, write, and verify.
- Each channel incorporates two 16-bit registers, namely DMA address register and byte count register.
- Each channel can transfer data up to 64kb and can be programmed independently.
- It operates in 2 -modes: Master mode and Slave mode.
0 Comments