Part 12: Microprocessor Peripheral Devices with PIN Configuration
Peripheral Devices In order to communicate with the outside world microcomputers, use peripherals...
Read More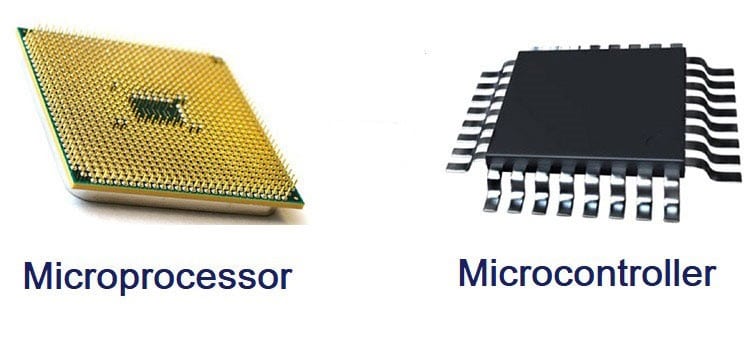
Peripheral Devices In order to communicate with the outside world microcomputers, use peripherals...
Read More
Microprocessor Application Microprocessor based systems are found everywhere today. It just not in...
Read More
What is a Microprocessor? A digital Computer or Computer’s Central Processing Unit (CPU)...
Read More
8085 microprocessor Instruction and Data Formats. There are numerous techniques to require data...
Read More
Recent Comments